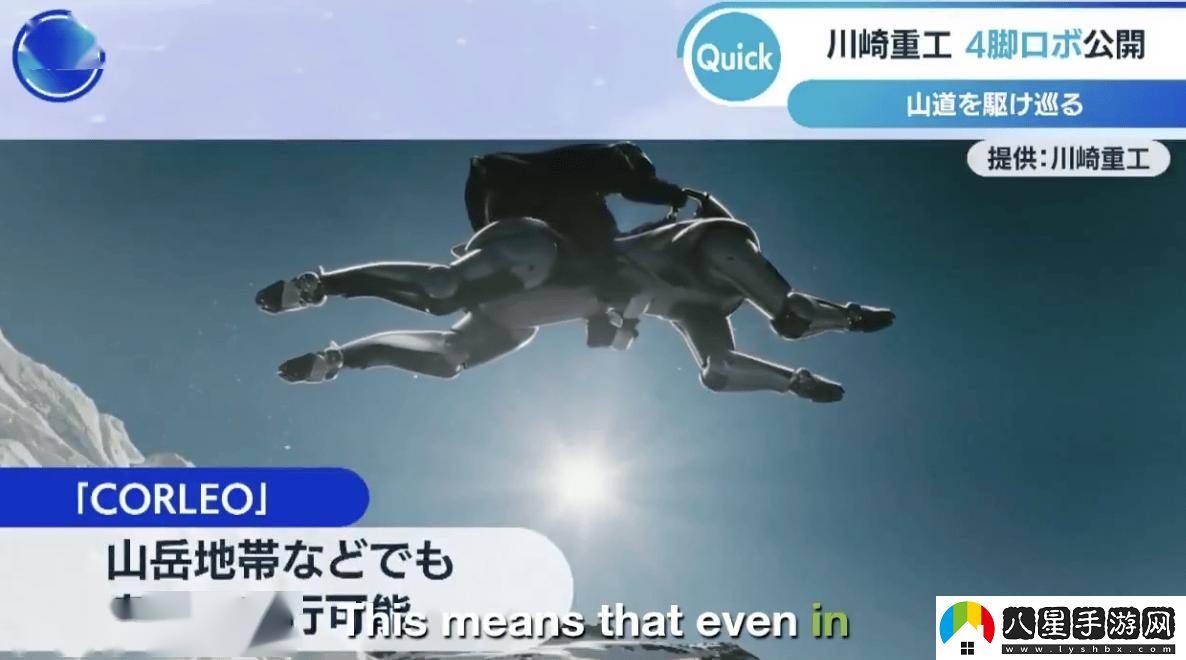
川崎重工在日本舉辦了一場(chǎng)別開(kāi)生面的發(fā)布會(huì ),正式揭曉了其最新研發(fā)的四足仿生概念車(chē)——“CORLEO”。這款越野車(chē)型摒棄了傳統設計理念,采用了四條獨立機械腿,以氫能作為動(dòng)力源,造型前衛,仿佛是從知名游戲地平線(xiàn)中駛出的未來(lái)載具。

CORLEO概念車(chē)將四足仿生機器人技術(shù)與摩托車(chē)工程完美融合,其四條機械腿能夠靈活獨立調節,后腿與前腿可分別進(jìn)行上下擺動(dòng),有效緩解行駛過(guò)程中的沖擊。尤其在面對復雜地形如階梯時(shí),駕駛者無(wú)需抬頭即可保持舒適姿態(tài),輕松應對前方路況,確保了行駛的平穩性和安全性。
該概念車(chē)的每條機械腿均裝備了兩組橡膠材質(zhì)的“蹄”,這些“蹄”不僅能夠有效吸收來(lái)自路面的顛簸,還具備出色的防滑性能。無(wú)論是崎嶇的草原、濕滑的雪地,還是布滿(mǎn)瓦礫的道路,CORLEO都能輕松駕馭,展現出卓越的越野能力。
在動(dòng)力方面,CORLEO搭載了一臺150cc的氫能發(fā)電引擎,雖然具體規格尚未公布,但這一創(chuàng )新動(dòng)力源已足夠引人注目。車(chē)輛還配備了一套交互中控系統,能夠實(shí)時(shí)顯示導航信息和車(chē)輛姿態(tài)數據,讓駕駛者能夠隨時(shí)掌握車(chē)輛狀態(tài),確保行駛的安全與高效。
川崎重工的這一創(chuàng )新之作,無(wú)疑為越野車(chē)型的發(fā)展開(kāi)辟了新的方向。CORLEO概念車(chē)的出現,不僅展示了川崎重工在技術(shù)研發(fā)方面的雄厚實(shí)力,也預示著(zhù)未來(lái)越野車(chē)型將更加注重智能化和人性化設計,為駕駛者帶來(lái)更加舒適、安全、高效的駕駛體驗。

 喜歡
喜歡
 頂
頂
 無(wú)聊
無(wú)聊
 圍觀(guān)
圍觀(guān)
 囧
囧
 難過(guò)
難過(guò)Copyright 2025 //www.ensureproengg.com/ 版權所有 豫ICP備2021037741號-1 網(wǎng)站地圖
 一邊做飯一邊躁狂的原因分析:廚房瑣事與壓力的碰撞
一邊做飯一邊躁狂的原因分析:廚房瑣事與壓力的碰撞